How It
Works
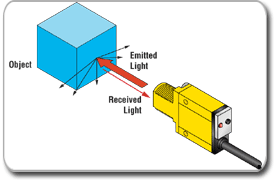
In diffuse-mode sensing, light emitted from the sensor strikes the
surface of the object to be detected and is diffused back, i.e.
sending some light back to the
receiver,
which is usually housed with the
emitter.
With a diffuse-mode sensor, the object is detected when it "makes"
the beam, that is, the object reflects the sensor’s transmitted
light energy back to the sensor.
Most
diffuse-mode sensors use
lenses
to
collimate
(convert a
divergent beam into a parallel beam)
the emitted light rays to gather in more light. These lenses also
help to extend the
range
of diffuse-mode sensors. |
Diffuse Sensing

Collimating Lens |
Pros:
Convenience
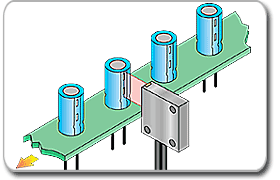
Diffuse-mode sensors have only one item to be mounted: the sensor
itself. This is ideal for situations where a sensor can be mounted
only on one side.
Pros:
Conveyors
A diffuse mode sensor may be used if an
opposed
or
retroreflective-mode sensor isn't practical in a
straightforward product presence sensing application. The
sensor-to-object distance should be from a few centimeters to a
meter.

Simple Close Mounting
Inaccurate for Glass
|
Cons: Dependant on Object
Reflectivity and Shape
The response of a diffuse-mode sensor is dramatically influenced by
the surface
reflectivity
of the object to be sensed. The reflectivity of an object directly
affects the distance at which it can be reliably sensed by a
diffuse-mode sensor. The shape of the object to be sensed is as
significant as reflectivity. Radiused or rounded objects present the
sensor with less surface area and therefore have a smaller signal
return path.
Cons: Shiny Surfaces
The use of
collimating
lenses maximizes sensing ranges of diffuse mode sensors. However, if
you are using diffuse sensors to detect shiny objects, the
collimating lens will affect the sensing angle. The sensor needs to
be perfectly parallel to the object being sensed in order to
guarantee a return light signal.
Cons:
Background Objects
As a general rule, verify that the distance from diffuse mode
sensors to the nearest background object is at least four times the
distance from the sensor to the object to be detected. However, if
the background is more reflective than the object to be detected,
more clearance will be required. If the background is not
controllable, consider the use of a
background
suppression sensor (similar
to a diffuse sensor, but with a defined range limit e.g. fixed-field
and adjustable-field).
Cons:
Small Parts Detection
Diffuse sensors have less sensing
range
when used to sense objects with small reflective area than when used
to sense objects with a large reflective area. Also the lens of most
diffuse mode sensors creates a
"blind spot"
for small parts that pass close to the lens.
A "Blind Spot" is an
area close to a sensor lens, where light energy is returned to the
emitter rather than the receiver, rendering the sensor effectively
blind. This effect is most pronounced with some retroreflective
sensors.
Cons: Low Excess Gain
Most diffuse mode sensors
lose their
gain
very rapidly as dirt and moisture accumulates on their
lenses.
In some instances, dirt build-up on the sensor lens can channel the
light beam from the
emitter
directly to the
receiver,
so that the sensor will act as if an object is constantly in front
of it. This event is called optical crosstalk.
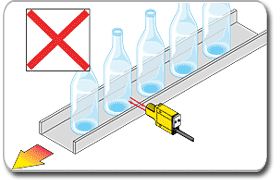
Cons: Count Inaccuracy
Diffuse mode sensors are
usually a poor choice for applications that require accurate
counting of radiused parts. Diffuse sensors are particularly
unreliable for counting glass or shiny objects, small parts, objects
with irregular surfaces, or parts that will pass by the sensor at
varying distances.
|